Eurobot 2004
Pierre Sermanet, Philippe Rambert, Jean-Baptiste Mouret and the rest of the Evolutek team
Eurobot international robotics contest
- Since 1998, Eurobot is an international robotics contest.
- Eurobot takes place in Europe but also welcomes countries from other continents.
- 2004: 21 countries, represented by 250 teams.
- New rules each year.

Rules: rugby match on a tropical island
Click here to download the video explaining the rules.
- 2 robots, 14 rugby balls, 2 random palm trees on the playground.
- 90 seconds matchs.
- The winner is the robot that has put more balls in the blue area or in the net.
- The robots can carry only 3 balls simultaneously.
The Robot: main components
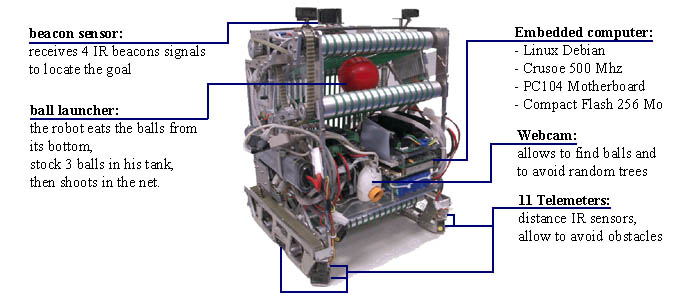
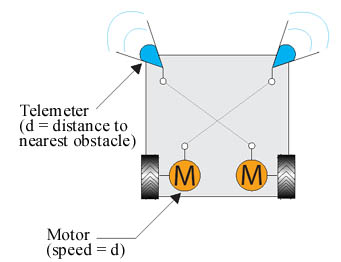
Movements: a reactive robot
This robot does not assume it is working on the Eurobot’s board, and therefore can evolve in an unknown environment. The best trajectory is calculated in real time according to:
- the distances given by the 11 telemeters
- the distances of the balls and trees given by the camera

3D Simulator: testing in good conditions
A 3D simulator has been developped in C++ and OpenGL in order to check the theorical robot’s behaviors. This simulator allows us to develop the robot’s AI software when the real robot is not functionnal.
Image processing: balls and trees
Thanks to the video camera, the robot is able to locate red balls and to subsequently head on towards the nearest red ball (blue areas are also detected in order to avoid them). This robot can also avoid green trees according to their distance and direction. The camera settings program has been developped in C++ and allows the user to check image processing results.
Robot behavior demonstrations